
Kiến Thức Tự Động Hóa
Bộ điều khiển PID là gì
Bộ điều khiển PID là gì? Cách thiết lập bộ điều khiển PID như thế nào? Vì sao phải sử dụng bộ điều khiển nhiệt độ, đo mức, áp suất,…có chức năng điều chỉnh PID? Nội dung bài viết hôm nay chia sẻ đến các bạn bộ điều khiển PID, cách thiết lập 1 bộ điều chỉnh PID
Bộ điều khiển PID là gì?
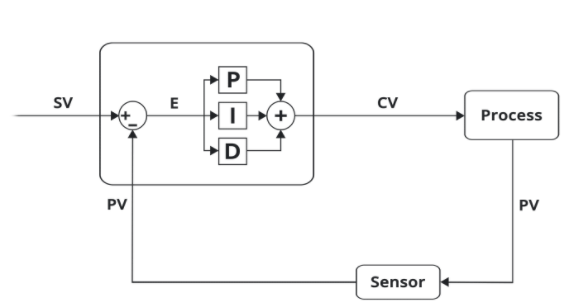
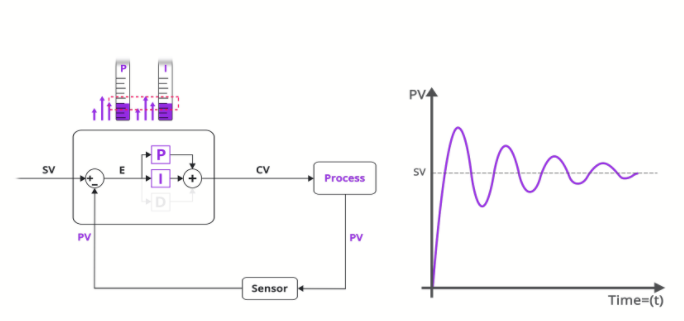
Theo các thuật ngữ đơn giản nhất, bộ điều khiển tính toán các hành động P, I và D và nhân từng tham số với sai số hoặc E, bằng với SP-PV trong hoạt động trực tiếp. Sau đó, tất cả các phép tính tham số được cộng lại để tạo ra biến điều khiển.
Thật không may, không có tiêu chuẩn công nghiệp về các điều khoản tham số. Dưới đây là một số công dụng được tìm thấy ngày nay
Điều chỉnh PID thuật ngữ tỷ lệ
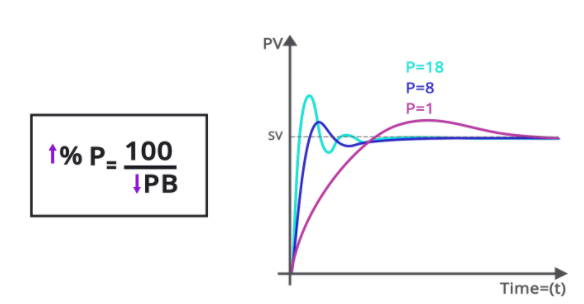
Thuật ngữ tỷ lệ, thường được gọi là P Constant, có thể được gọi là độ lệch tỷ lệ hoặc chỉ Độ lợi, không phải là một đơn vị mà thay vào đó là một tỷ lệ. Thông số này cũng có thể được gọi là dải tỷ lệ và được đo bằng đơn vị phần trăm.
Tham số có thể được gọi là K P , Gain, hoặc các tham số khác. Đây là thông số quyết định tốc độ phản hồi của hệ thống. Tên mà nó được gọi thay đổi theo nhà sản xuất.
– Đối với bộ điều khiển sử dụng thuật ngữ Gain, việc điều chỉnh thông số điều chỉnh này cao hơn có thể gây ra các vòng lặp nhạy hơn, kém ổn định hơn.
– Ngược lại, trên bộ điều khiển có đơn vị băng tần tỷ lệ, việc giảm thông số điều chỉnh này sẽ ảnh hưởng đến vòng lặp theo cách tương tự.
Hãy ghi nhớ điều này, biết loại bộ điều khiển bạn có là điều cần thiết để đảm bảo rằng bạn đang điều chỉnh đúng các thông số của mình.
Điều chỉnh PID thuật ngữ tích phân
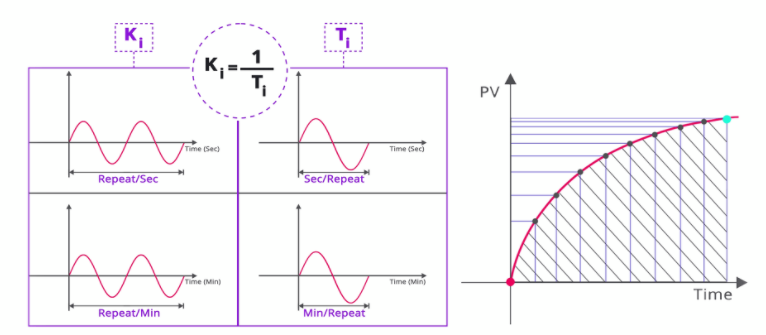
Thuật ngữ tích phân hoặc I Hằng số thường được gọi là Đặt lại có thể được thể hiện theo cách khác nhau, chẳng hạn như:
– Số lần lặp lại mỗi giây,
– Giây mỗi lần lặp lại,
– Số lần lặp lại mỗi phút,
– Phút mỗi lần lặp lại.
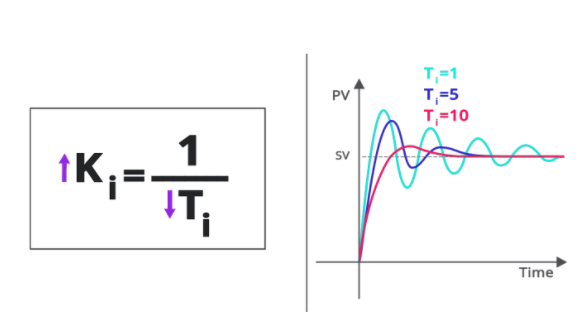
Bất kể loại phép đo nào, tích phân là tổng của tất cả các giá trị được báo cáo từ tín hiệu, được ghi lại từ khi bạn bắt đầu đếm đến khi bạn hoàn thành việc đếm hoặc diện tích dưới một đường cong được vẽ. Tham số này có thể được gọi là K i , T i , hoặc các tham số khác. Tham số này xác định tốc độ loại bỏ lỗi trạng thái ổn định.
Do các phép đo khác nhau, thông số này có thể không trực quan để điều chỉnh.
Tóm lại, các giá trị nhỏ hơn trong số phút cho mỗi phép đo lặp lại sẽ tạo ra hành động tích phân lớn hơn trong đó các giá trị lớn hơn trong các phép đo lặp lại trên mỗi phút, sẽ tạo ra hành động tích phân lớn hơn.
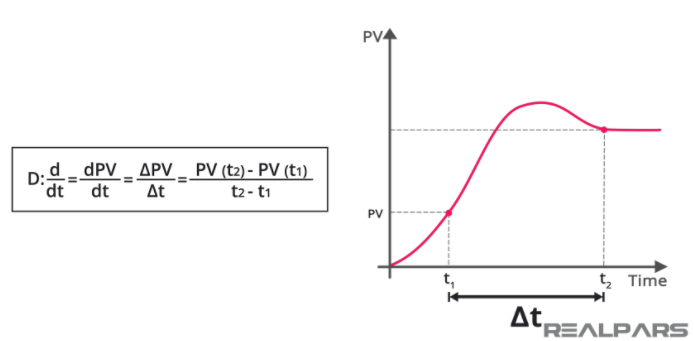
Điều chỉnh PID thuật ngữ đạo hàm
Đạo hàm hoặc D Các đơn vị không đổi thường là giây hoặc phút.
Mục đích của hằng số Đạo hàm là để dự đoán sự thay đổi. Hành động phái sinh phản ánh tốc độ thay đổi được đo lường trong biến quá trình.
Giá trị của tham số này về cơ bản có nghĩa là bạn muốn dự đoán tốc độ thay đổi bao xa trong tương lai. Tham số này có thể giúp tạo phản hồi nhanh hơn trong vòng lặp của bạn và vòng lặp hoạt động tốt hơn.
Tuy nhiên, vì thuật ngữ phái sinh đo tốc độ thay đổi trong biến quá trình, nên biến quá trình phải là một tín hiệu rất sạch có nghĩa là không có nhiễu trong tín hiệu. Vì lý do đó, các thuật ngữ phái sinh không thường được sử dụng trong các kiểm soát.
Các thuật toán và thông số PID
Bộ điều khiển được sử dụng phổ biến nhất là PI. Hầu hết các quy trình có thể được phục vụ tốt với loại kiểm soát này. Bộ điều khiển P và PID đôi khi được sử dụng trong khi bộ điều khiển PD hiếm khi được sử dụng.
Bộ điều khiển PID là thiết bị rất tinh vi với nhiều thông số có thể điều chỉnh được. Các loại quy trình và thuật toán cũng có thể khác nhau. Các thông số khác cần nghiên cứu cho bộ điều khiển PID là :
– Thuật toán chuỗi,
– Các thuật toán lý tưởng,
– Thuật toán song song,
– Lọc,
– Thời gian quét,
– Tự điều chỉnh so với tích hợp các quá trình,
– Hành động ngược lại,
– Thời gian chết,
– Lỗi,
– Phái sinh trên E hoặc Phái sinh trên PV,
chỉ để đề cập đến một vài.

Các phương pháp điều chỉnh PID
Do khó khăn cố hữu trong việc điều chỉnh các vòng lặp PID cơ bản nhất, các tham số này, nâng cao hơn so với hướng dẫn cơ bản này, tốt hơn nên để lại cho các bài học trong tương lai hoặc tự khám phá.
Có một khoa học để điều chỉnh một vòng lặp PID nhưng phương pháp điều chỉnh được sử dụng rộng rãi nhất là thử và sai .
Có những phương pháp khác yêu cầu quá trình nhiều bước để xác định vị trí số của bạn.
Mục tiêu của việc điều chỉnh là đảm bảo dao động quá trình nhỏ nhất xung quanh điểm đặt sau khi xảy ra nhiễu.
Bước đầu tiên trong việc điều chỉnh bộ điều khiển của bạn là xác định mức độ điều chỉnh mà bạn có thể thực hiện mà không ảnh hưởng nghiêm trọng đến quá trình.
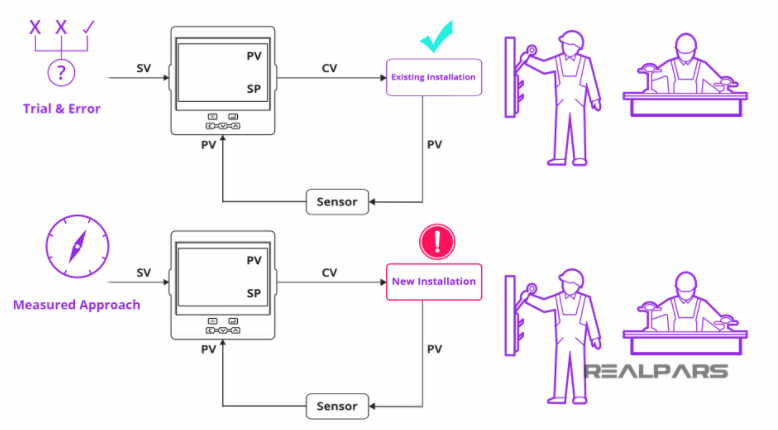
Nói chuyện với nhân viên nhà máy, nếu việc điều chỉnh các thông số của bộ điều khiển PID không có phản ứng bất lợi thì bạn có thể bắt đầu điều chỉnh. Nếu các tác động sẽ gây bất lợi, bạn phải thực hiện một cách tiếp cận được đo lường hơn .
Rõ ràng, tùy thuộc vào việc đây là một công trình lắp đặt mới hay một nhà máy hiện có, cách tiếp cận của bạn sẽ khác nhau. Trong các cài đặt hiện có, bạn chỉ đang tìm cách tinh chỉnh các giá trị và tạo một quy trình ổn định hơn.
Cách điều chỉnh bộ điều khiển PI
Cách điều chỉnh PI nếu PV thay đổi nhanh
Bởi vì bộ điều khiển PI được sử dụng rộng rãi nhất, chúng tôi sẽ chỉ điều chỉnh các tham số đó. Như chúng ta đã thảo luận về sự khác biệt trong các phép đo trong các thuật ngữ PID, đối với hướng dẫn này, chúng ta sẽ chuẩn hóa độ lợi và số lần lặp lại mỗi phút.
Để bắt đầu ngay lập tức, nếu biến quy trình của bạn thay đổi nhanh chóng với các thay đổi đối với Biến kiểm soát, bạn sẽ bắt đầu với mức tăng thấp, có thể là 0,1 trong khi điều chỉnh đặt lại của bạn từ 1 đến 10 lần lặp lại mỗi phút.

Cách điều chỉnh PI nếu PV thay đổi chậm
Ngược lại, nếu biến quá trình thay đổi chậm, hãy bắt đầu với mức tăng cao hơn và giá trị đặt lại thấp hơn, nằm trong khoảng từ 2 đến 8 và 0,05 và 0,5 tương ứng.
Chỉ điều chỉnh một thông số tại một thời điểm và quan sát kết quả. Tiếp tục cho đến khi bạn đã đạt được một quy trình ổn định.

Một cách tiếp cận được đo lường nhiều hơn là bắt đầu với độ lợi thấp, với tích phân và đạo hàm bị vô hiệu hóa.
Theo dõi quá trình và bắt đầu điều chỉnh từng bước mức tăng bằng cách tăng gấp đôi giá trị. Khi quá trình bắt đầu dao động, hãy điều chỉnh giá trị khuếch đại giảm 50%.
Sử dụng một giá trị tích phân nhỏ và theo dõi quá trình. Tăng gấp đôi giá trị cho đến khi dao động xảy ra sau đó cắt tích phân đi 50%.
Tại thời điểm này, bạn nên ở đâu đó trong khu vực lân cận và có thể bắt đầu quá trình tinh chỉnh.
Thông qua bài viết này bạn nắm được các thông số PID sau :
Bạn có thể sử dụng bộ điều khiển PI cho hầu hết các quy trình của mình.
Đảm bảo rằng bạn biết loại đo lường của bộ điều khiển đã chọn và chỉ cần điều chỉnh từng bước các thông số P và I cho đến khi bạn đạt được quy trình ổn định tốt đẹp đó.
Nếu bạn thích cách tiếp cận điều chỉnh khoa học hơn, chúng tôi có thể đề cập đến vấn đề đó trong một bài báo trong tương lai hoặc vui lòng tìm kiếm các phương trình và các bước cần thiết cho cách tiếp cận đó.
Nguồn bài viết : realpars.com
Bài viết tham khảo : Pressure switch là gì?