
Kiến Thức Tự Động Hóa
Cài đặt thông số PID
Cài đặt thông số PID
Trong bài viết này, chúng ta sẽ xem xét các tác động của hành động chỉ theo tỷ lệ trên một vòng điều khiển luồng.
Điều khiển chỉ theo tỷ lệ là đơn giản nhất trong số các hành động của bộ điều khiển PID nhưng hiếm khi được sử dụng trong các quy trình sản xuất công nghiệp.
Vấn đề với điều khiển P-Only là một cái gì đó được gọi là Offset. Trong bài viết này, chúng tôi sẽ giải thích Offset và chỉ cho bạn cách thức và thời điểm nó xảy ra.
Bài viết chia sẻ thông tin hữu ích. Vui lòng không gọi, nhắn tin hỏi,….Bài viết được chia sẻ lại từ web realpars.com
Cài đặt thông số PID cho đồng hồ lưu lượng điện từ
Bộ điều khiển trong vòng lặp của chúng tôi là điển hình của hầu hết các bộ điều khiển. Chúng tôi có thể điều chỉnh điểm đặt và chuyển đổi giữa tự động và thủ công. Trong điều khiển bằng tay, chúng ta có thể điều chỉnh đầu ra của bộ điều khiển với số lượng chính xác mà chúng ta muốn.
Vòng lặp dòng chảy của chúng tôi có một máy bơm để di chuyển chất lỏng quy trình của chúng tôi. Chúng ta có thể bật hoặc tắt máy bơm, điều này sẽ rất hữu ích để quan sát các phản ứng PID trong điều kiện tĩnh và động.
Được rồi… Hãy bắt đầu mọi thứ với việc xem xét P&ID vòng điều khiển luồng của chúng tôi.
Dòng chảy được điều khiển bởi thiết bị truyền động cuối cùng bằng khí nén FCV200. Bộ điều khiển FRC200 tạo ra tín hiệu điện vận hành bộ truyền động cuối cùng bằng khí nén thông qua bộ chuyển đổi Dòng điện sang Áp suất (I / P) FY200.
Máy phát áp suất chênh lệch FT200 gửi tín hiệu điện đại diện cho tốc độ dòng chảy đến bộ điều khiển.
Cách cài đặt PID theo tỉ lệ
chúng ta hãy xem xét một vòng lặp đang hoạt động. OK… Hãy bắt đầu điều tra tác động của việc điều chỉnh lượng Hành động theo tỷ lệ trên vòng lặp dòng chảy của chúng ta.
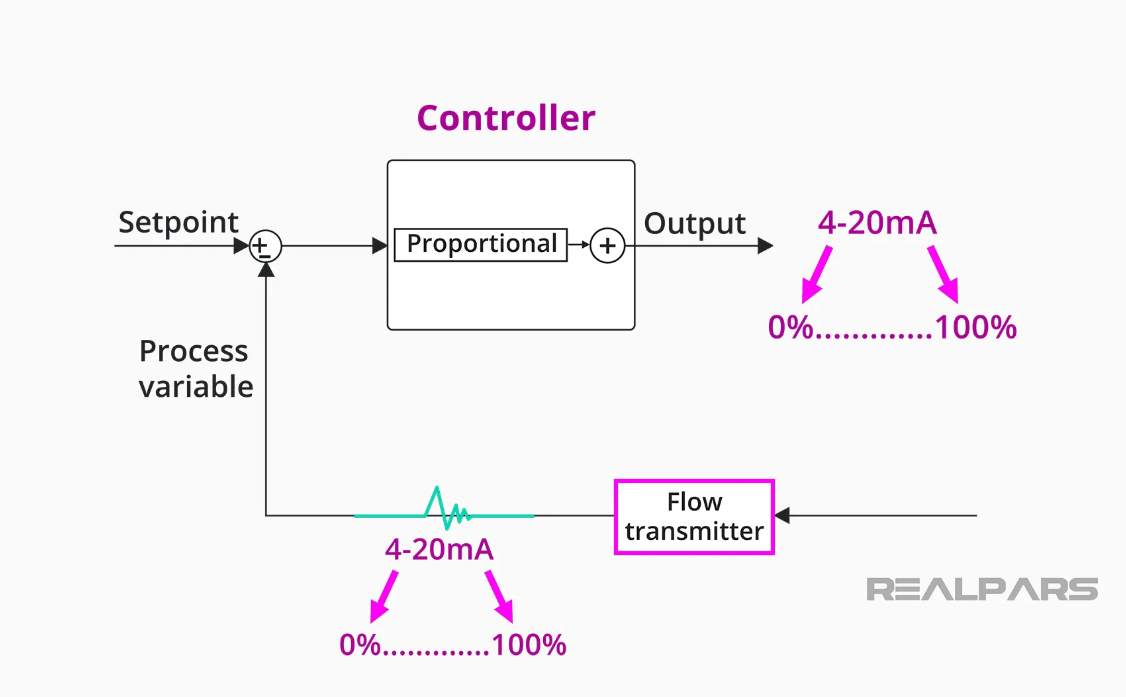
Phạm vi đầu ra của bộ điều khiển là 4 đến 20mA đại diện cho 0 đến 100%. Khi quá trình ổn định, đầu ra bộ điều khiển sẽ ở một số giá trị trong khoảng từ 4 đến 20mA.
Biến quá trình cũng được biểu diễn bằng tín hiệu 4 đến 20mA từ bộ truyền Dòng chảy. Tín hiệu này đại diện cho 0 đến 100% của biến quá trình.
Được rồi, bây giờ chúng ta đã biết vòng lặp dòng chảy hoạt động như thế nào, hãy chuyển sang Điều khiển theo tỷ lệ. Vậy,… Hành động theo tỷ lệ là gì?
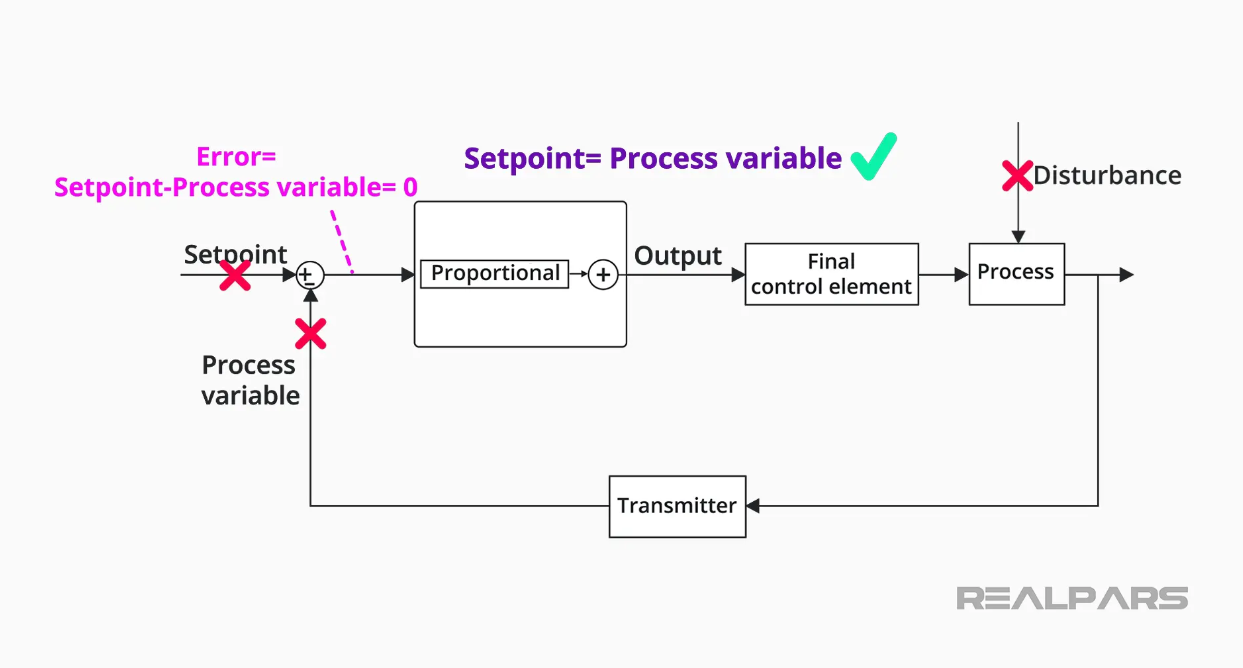
Công việc của bộ điều khiển là đảm bảo rằng Biến quá trình giống với Điểm đặt. Bộ điều khiển luôn xem xét sự khác biệt giữa Điểm đặt và Biến quá trình. Sự khác biệt này thường được gọi là Lỗi.
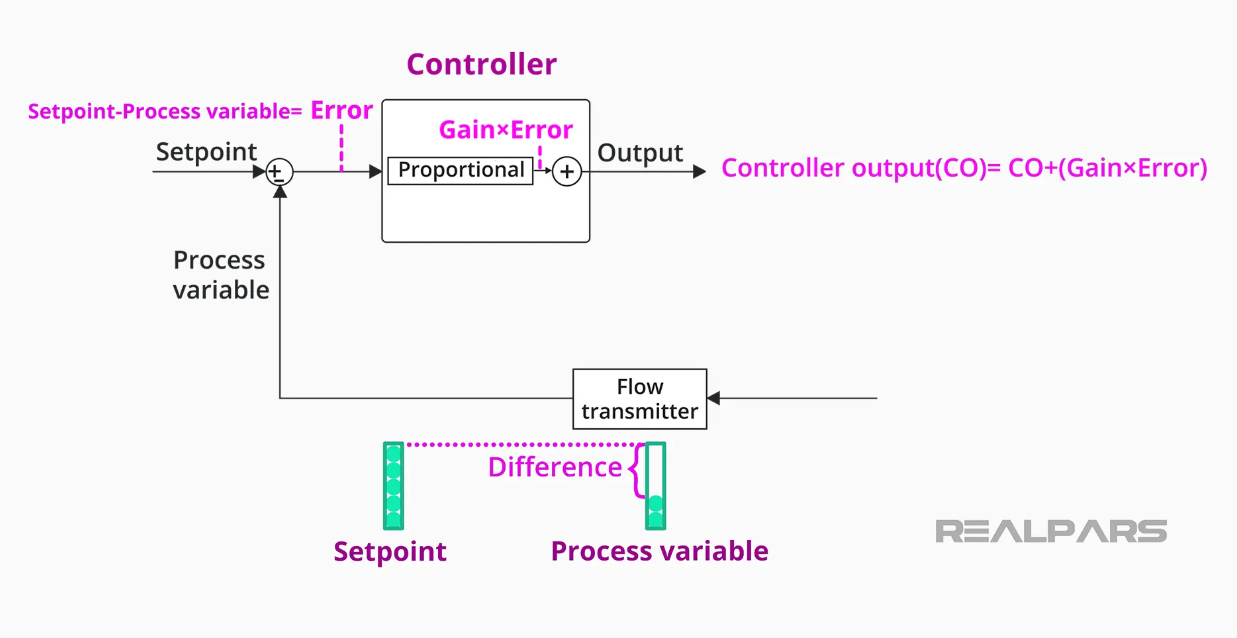
Hành động theo tỷ lệ là sự khuếch đại của lỗi. Khuếch đại tỷ lệ này không có đơn vị và thường được gọi là Gain . Kết quả khuếch đại này được thêm vào đầu ra bộ điều khiển hiện tại.
ĐƯỢC RỒI. Bây giờ chúng ta có một công thức toán học đơn giản.
Đầu ra Bộ điều khiển mới = Đầu ra Bộ điều khiển trước đó (CO) + (Tăng × Lỗi)
Ví dụ cài đặt thông số PID
Hãy xem một ví dụ về Hành động theo tỷ lệ và cách áp dụng công thức toán học đó.
Chúng tôi sẽ bắt đầu với máy bơm TẮT. Với bộ điều khiển trên Thủ công, chúng tôi sẽ đặt đầu ra thành 50%. Chúng tôi sẽ đặt Gain thành 1.
Bây giờ hãy đặt bộ điều khiển thành Tự động. Khi máy bơm TẮT, PV hoặc Biến quá trình sẽ bằng 0.
Xem điều gì sẽ xảy ra khi chúng tôi thay đổi Điểm đặt từ 0% thành 10%. Sự thay đổi 10% của Setpoint tạo ra sự thay đổi 10% trong đầu ra của Bộ điều khiển. Tại sao? Đầu ra Bộ điều khiển (CO) thay đổi 10% từ 50% thành 60%
Trước đó, chúng tôi đã nói rằng hành động Tỷ lệ dẫn đến sự thay đổi trong đầu ra của bộ điều khiển dựa trên công thức toán học đơn giản: Đầu ra của bộ điều khiển = CO + (Gain × Error)
Điểm đặt của chúng tôi đã thay đổi từ 0 thành 10%, tạo ra sai số là 10%. Mức tăng được đặt thành 1.
Bởi vì Gain là 1, hành động tỷ lệ sẽ chỉ thêm 10% vào đầu ra của bộ điều khiển. Đầu ra của Bộ điều khiển ở mức 50%, vì vậy việc thêm phản hồi tỷ lệ sẽ chuyển nó lên 60%.
Ví dụ tiếp theo về cài đặt thông số PID
Hãy thử lại lần nữa, nhưng lần này, chúng ta sẽ tăng Gain lên 2. Lần này CO thay đổi từ 50% thành 70%, tức là thay đổi 20%. Tại sao? Bởi vì Gain bây giờ được đặt ở 2, do đó hành động tỷ lệ sẽ thêm 20% vào đầu ra của bộ điều khiển.
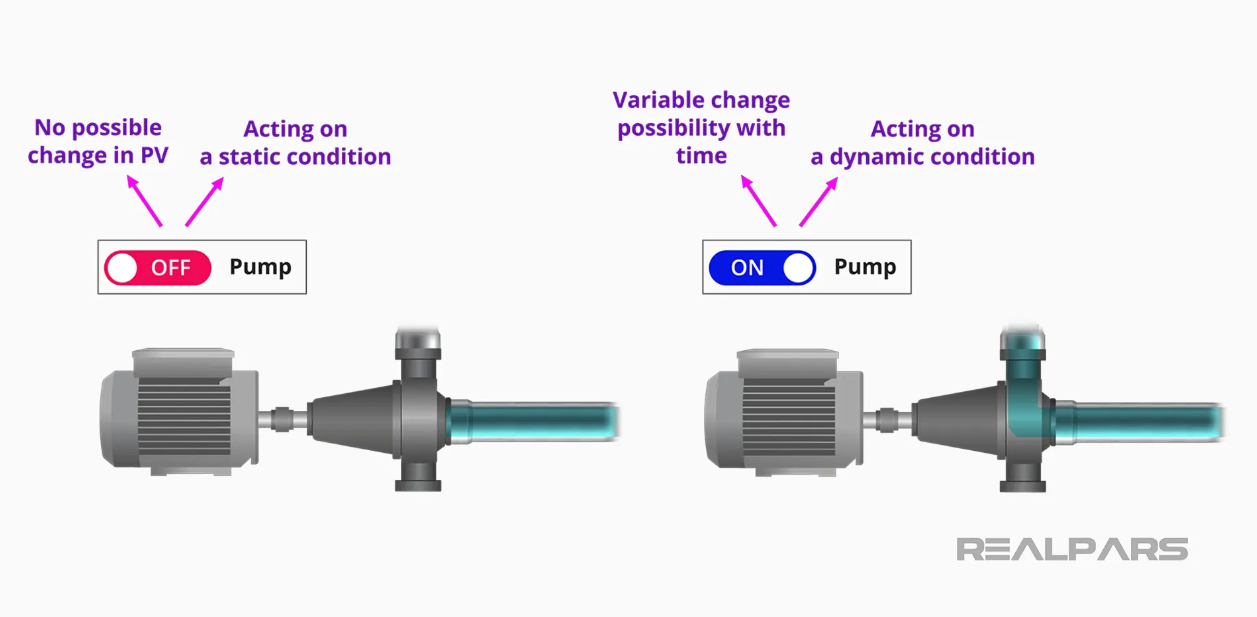
Hãy nhớ rằng máy bơm đã TẮT cho cả hai thử nghiệm của chúng tôi. Với Máy bơm TẮT, chúng tôi không có khả năng thay đổi trong biến quy trình do đó Hành động theo tỷ lệ của chúng tôi đang hoạt động trên điều kiện tĩnh.
Khi máy bơm khởi động, chúng ta đang ở trong một môi trường năng động và các biến số thay đổi theo thời gian.
Ví dụ khác cùng xem nhé
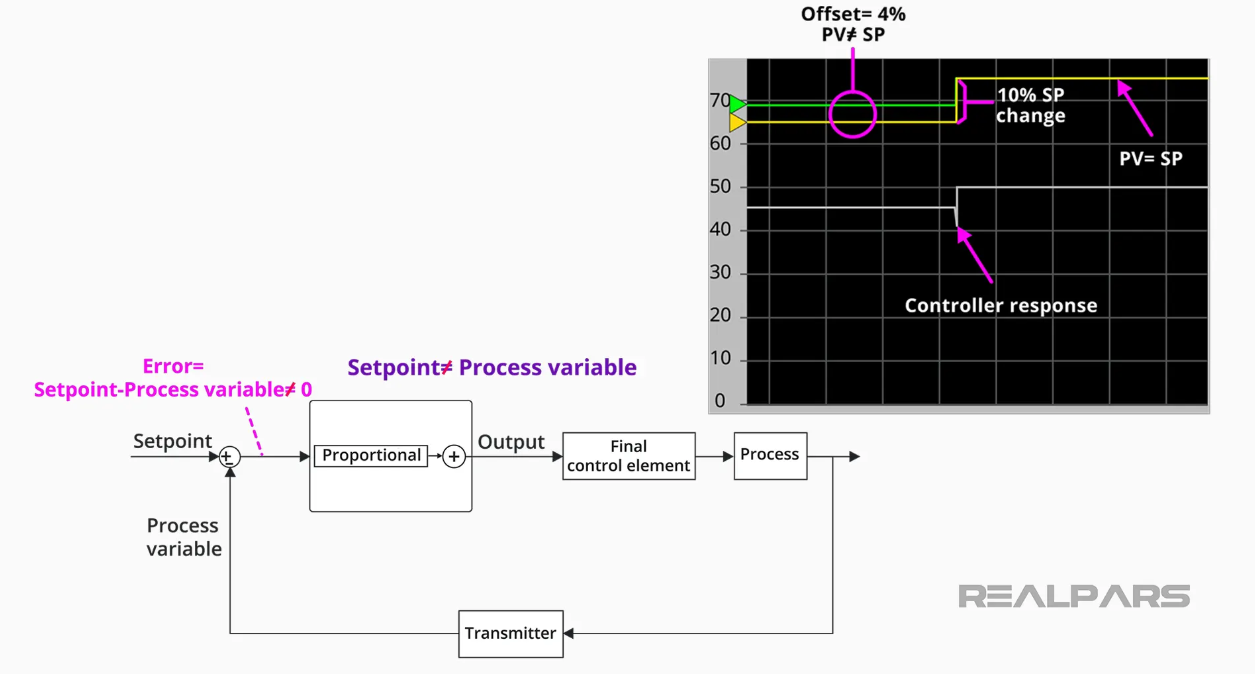
Hãy BẬT máy bơm và xem phản ứng động của Hành động theo tỷ lệ. Chúng tôi bắt đầu với Biến quy trình ở giá trị điểm đặt là 75%.
Khi chúng tôi đưa ra thay đổi điểm đặt thành 65%, Bộ điều khiển bắt đầu Hành động theo tỷ lệ và cố gắng thay đổi Biến quy trình để chuyển sang 65%. Nhưng, Biến quá trình chỉ tăng lên 69% và vẫn ở đó!
Bộ điều khiển chỉ tỷ lệ thực hiện công việc mong đợi của nó, ít nhất là cho đến khi xảy ra sự xáo trộn, biến quá trình hoặc thay đổi điểm đặt.
Bù đắp trong điều khiển PID
Lúc đầu, Biến Quy trình bằng Điểm đặt và Lỗi bằng 0. Biến quá trình là ổn định. Một sự xáo trộn quy trình sẽ làm cho biến quy trình thay đổi và bộ điều khiển sẽ hành động.
Thật không may, quá trình sẽ phục hồi trở lại điều kiện ổn định, NHƯNG KHÔNG với biến quá trình tại điểm đã đặt.
Sự khác biệt giữa biến quy trình và điểm đặt được gọi là Offset và xảy ra trong Bộ điều khiển chỉ theo tỷ lệ.
Được rồi… hãy tóm tắt những gì chúng ta đã thảo luận…
– Công việc của Controller là đảm bảo rằng Process Variable giống như Setpoint.
– Bộ điều khiển luôn xem xét sự khác biệt giữa Điểm đặt và Biến quá trình và sự khác biệt này thường được gọi là Lỗi.
– Hành động theo tỷ lệ là sự khuếch đại của lỗi.
– Khuếch đại tỷ lệ không có đơn vị và thường được gọi là Gain.
– Một công thức toán học đơn giản cho đầu ra Bộ điều khiển sau khi hành động theo tỷ lệ là: Đầu ra bộ điều khiển = CO + (Gain × Error)
– Bộ điều khiển Chỉ theo Tỷ lệ sẽ dẫn đến điều kiện Chênh lệch sau khi có sự xáo trộn hoặc thay đổi Điểm đặt.
Bài viết tham khảo thêm : Cảm biến Laser là gì